
С миллиметровой точностью: перспективные разработки ООО «нтлаб-ск» в области высокоточной навигации
Передовые изобретения и технологии становятся неотъемлемой частью повседневной жизни. Стремительное развитие космической отрасли, геодезии и картографии, а также инновации в строительстве, сельском хозяйстве и робототехнике предъявляют повышенные требования к точностным характеристикам навигационных устройств.
Приемники семейства «Глонаша»
Новые технические решения рождаются постоянно, однако сложно создать продукт, который будет востребован рынком.
Компания «НТЛаб» более тридцати лет занимается разработкой и производством интегральных микросхем (СБИС), приемных модулей и аппаратуры для высокоточного определения координат. В настоящее время, будучи партнером АО «Объединенная ракетно-космическая корпорация», ООО «НТЛаб-СК» содействует импортозамещению и помогает вывести отечественные разработки в области навигации на новый уровень, используя при этом современную отечественную элементную базу.
«НТЛаб» разработала линейку высокоточных навигационных приемников семейства «Глонаша», которые способны определять координаты с миллиметровой точностью. Специалистами компании спроектированы ключевые компоненты приемников (аналоговые и цифровые СБИС), а также программное обеспечение и конструкция изделий.
Приемники семейства «Глонаша» обеспечивают получение высокоточных навигационных данных в режимах DGPS (ошибка позиционирования — менее одного метра), PPP (сантиметровая точность позиционирования) и RTK (миллиметровая точность позиционирования).
Модули «Глонаша» позволяют принимать и обрабатывать сигналы от спутниковых систем ГЛОНАСС, GPS, Galileo, BeiDou, NavIC (IRNSS), QZSS и SBAS в частотных диапазонах L1, L2, L3, L5 и ряде других. Уникальная особенность приемников «НТЛаб» — работа с сигналами индийской навигационной системы NavIC в частотном диапазоне S (2492.028 МГц).
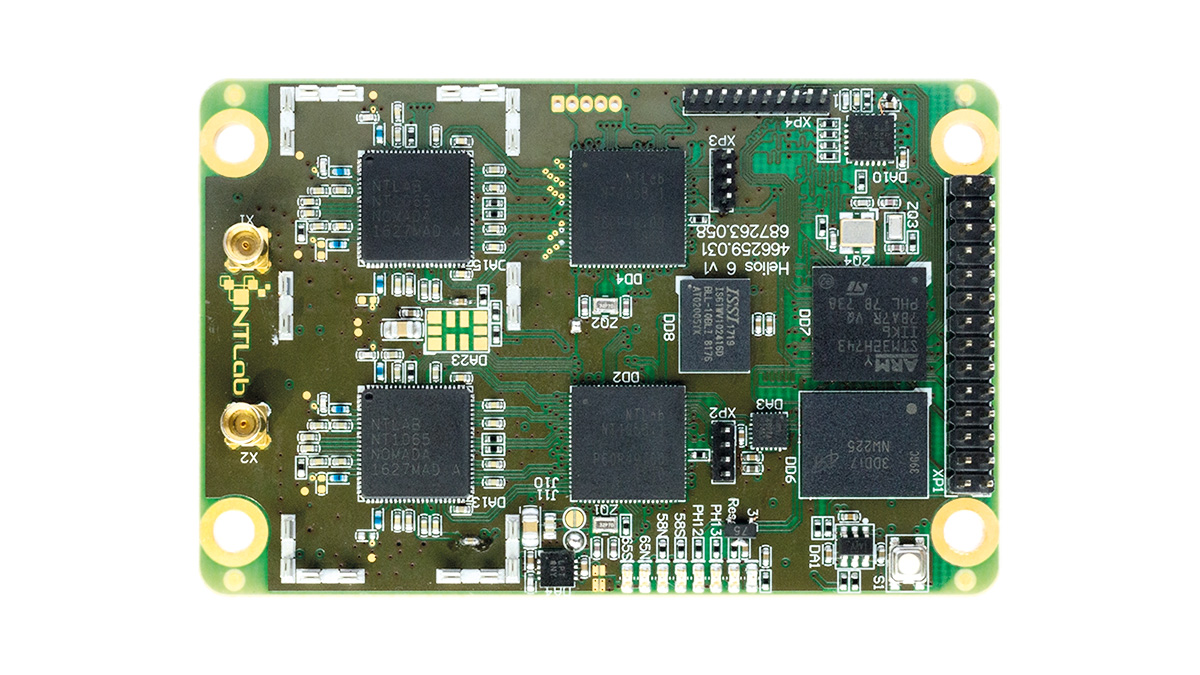
В качестве примера на рисунке 1 показан двухантенный навигационный модуль NTL105. Он позволяет определять координаты объекта, его скорость движения, текущее время и два угла пространственной ориентации: истинный курс, а также тангаж или крен.
«Глонаша» — это мультисистемный многочастотный приемник, работающий на геодезическом уровне точности, что подтверждается многочисленными сравнениями и экспериментами в режиме постобработки, а также в режиме реального времени.
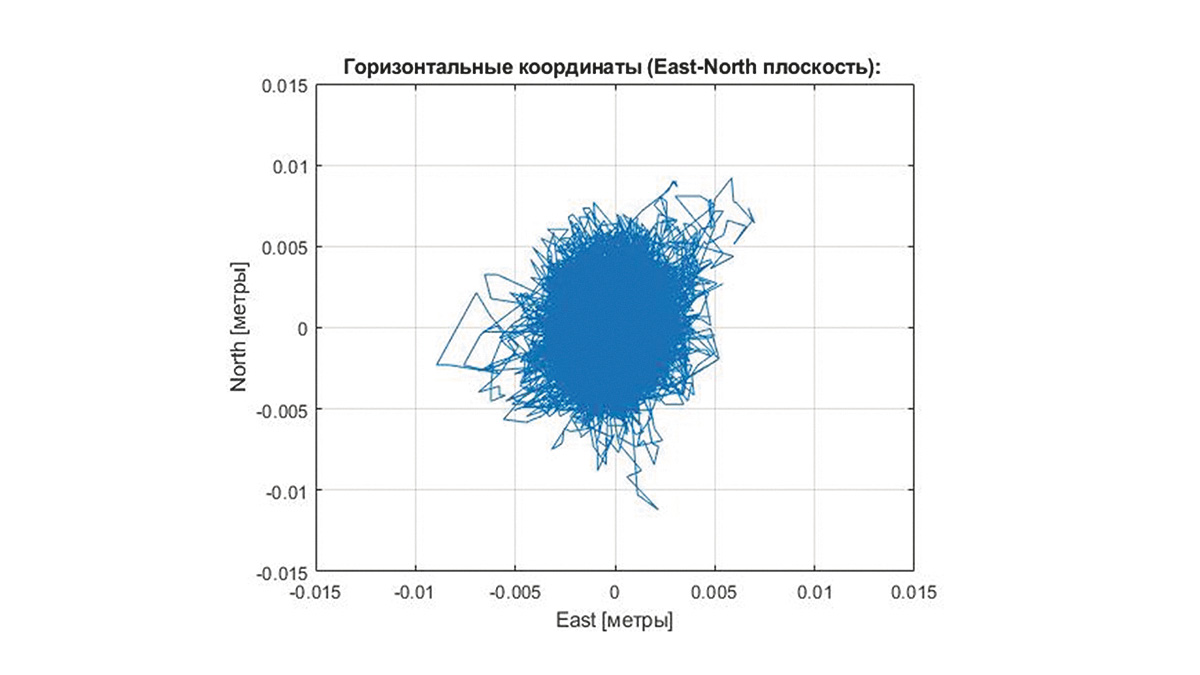
На рисунке 2 представлен результат работы приемника NTL105 в режиме RTK на протяжении 1 часа 15 минут. В качестве базовой станции был использован приемник BD930 производства компании Trimble. Горизонтальная точность при этом составила порядка двух миллиметров (нулевая базовая линия), что соответствует лучшим индустриальным показателям такого рода аппаратуры. Наряду с демонстрацией достижимой точности позиционирования этот результат говорит о совместимости приемников «НТЛаб» с приемниками производства Trimble.
Алгоритмы PPP
Специалистами «НТЛаб» разработаны алгоритмы PPP для встроенного программного обеспечения навигационных модулей. Эти же алгоритмы используются в программном обеспечении персонального компьютера, которое имеет два режима функционирования: реальное время и постобработка. В настоящее время поддерживается двухчастотный режим позиционирования по трем навигационным системам: ГЛОНАСС, GPS, Galileo. В перспективе планируется поддержка BeiDou, NavIC, QZSS. Возможность включения данных навигационных систем в решение PPP определяется наличием поддержки сигналов от этих систем провайдером PPP-коррекций.
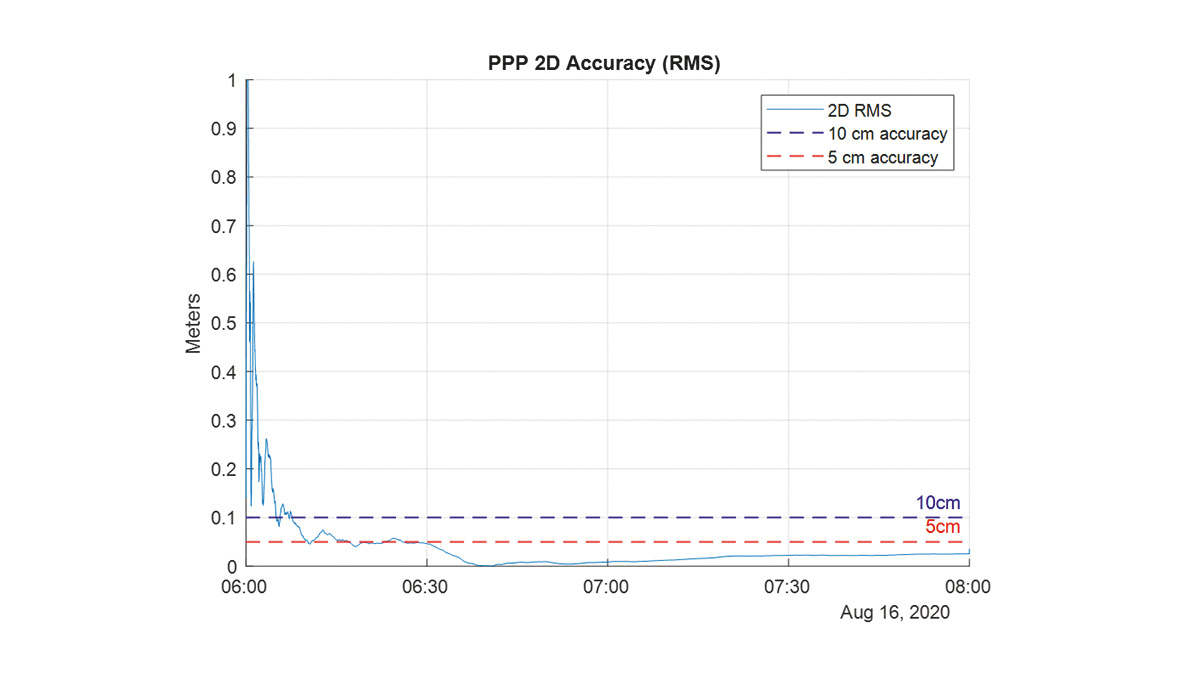
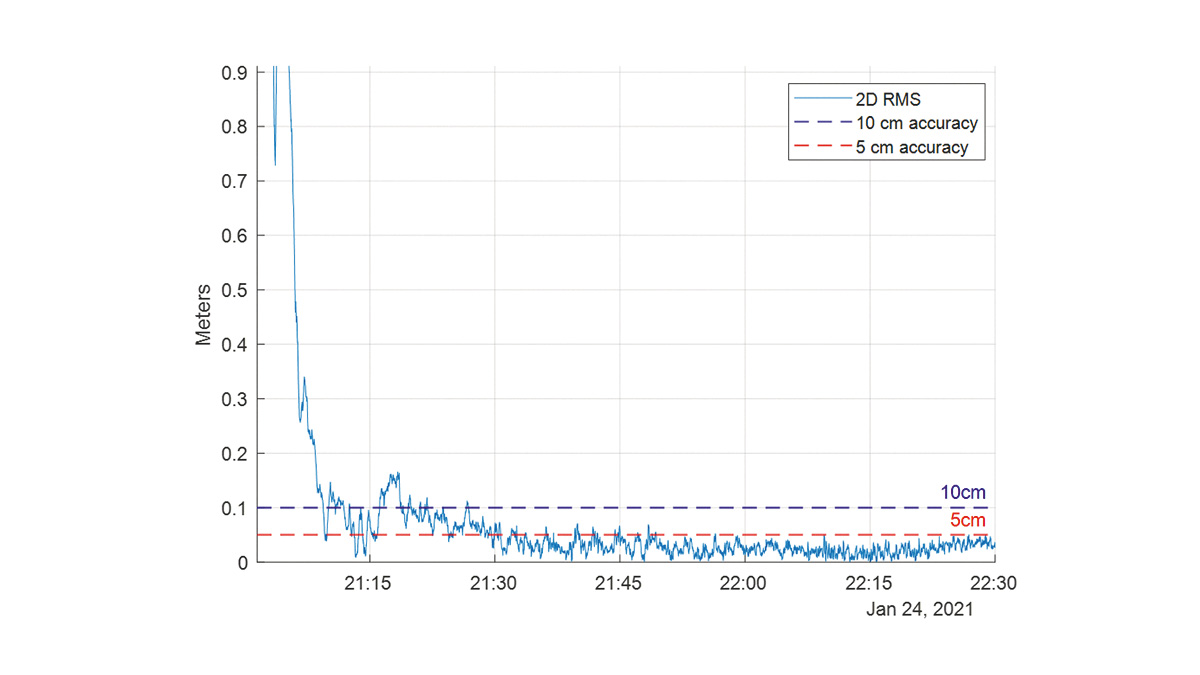
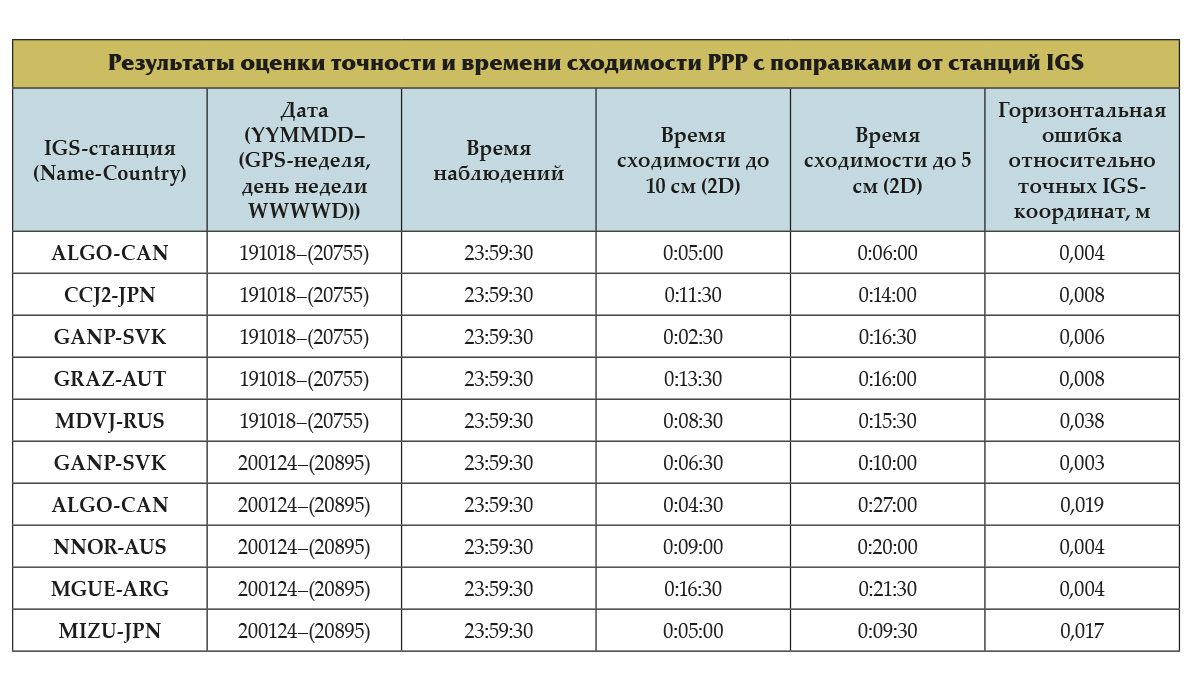
Как следует из приведенной таблицы, время сходимости до заданной точности может варьироваться в довольно больших пределах и зависит от количества спутников, атмосферных условий, многолучевости, качества оценки поправок к орбитам и часам и т. д. В среднем для данных IGS-файлов оно составляет 8 и 15 минут для критериев сходимости 10 и 5 сантиметров в горизонтальной плоскости соответственно. Cравнение с заранее известными точными координатами IGS-станций (SINEX-файлы) демонстрирует сходимость PPP-решения на уровне лучше одного сантиметра в большинстве случаев, что говорит об отсутствии каких-либо значимых систематических ошибок в PPP-решении.
На рисунках 3 и 4 представлены графики сходимости PPP-решения в режимах статики и кинематики соответственно. Результаты получены на навигационном модуле NTL105 в режиме реального времени на неподвижной антенне.
Для всех приведенных выше результатов использовался двухчастотный (L1/L2) двухсистемный (ГЛОНАСС/GPS) режим обработки ГНСС-измерений. Полученные результаты демонстрируют возможности алгоритмов RTK и PPP, реализованных в настоящее время в навигационных модулях компании «НТЛаб».
Данные алгоритмы высокоточного позиционирования могут быть перенесены практически на любую программно-аппаратную платформу, отвечающую минимальным требованиям к объему памяти и быстродействию при работе в режиме реального времени.
генеральный директор ООО «НТЛаб-СК»
Алексей Евгеньевич ЗИНОВЬЕВ,
главный конструктор направления глобальных навигационных спутниковых систем ООО «НТЛаб-СК»
Константин Валерьевич Юрьев,
главный специалист ООО «НТЛаб-СК»
143026, г. Москва, ИЦ «Сколково», Большой бульв., 42, оф. 1.159
Телефон (495) 248-05-60
E-mail: info (@) ntlab-sk.ru
www.ntlab-sk.ru


















